 |
| 現在までに開発されている多くの歩行ロボットは動物に比べ移動時のエネルギー効率が劣る.エネルギー効率が劣る原因としては重力や慣性力などのエネルギーをうまく利用していないことにある.そこで,重力や慣性力などのエネルギーのみで歩行を行う受動歩行に注目した.受動歩行とは,単純な構造のロボットがゆるい傾斜のついた坂をアクチュエータなしに下りていく歩行形態である.受動歩行の特徴として非常にエネルギー効率が良い. 本研究では膝を有する4足歩行ロボットで,受動歩行の原理を用いたエネルギー効率の良い歩行の実現を目標とする.従って,受動歩行の原理の解明が必要不可欠である.そこで,ODE(1)(Open Dynamics Engine)を用いて4足受動歩行ロボットの歩行シミュレーションを行った(Mov 1).また,受動歩行の運動方程式を導出し,数値計算を行った(Mov 2).また,ロボットを作成し,歩行実験を行った(Mov 3). | |||
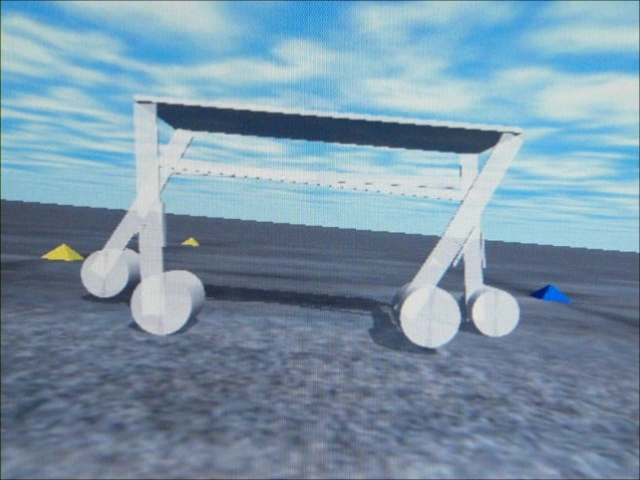 | |||
| Mov.1 Culculated result of the simulation with ODE ※動画を見る際はタイトルをクリックして下さい. |
|||
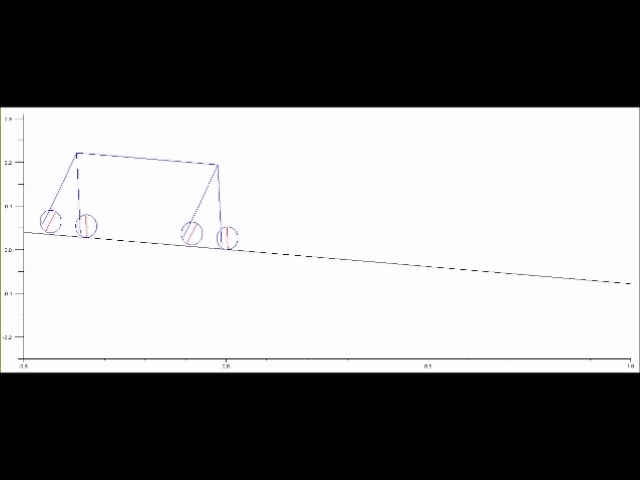 | |||
| Mov.2 Culculated result of equation of motion ※動画を見る際はタイトルをクリックして下さい. |
|||
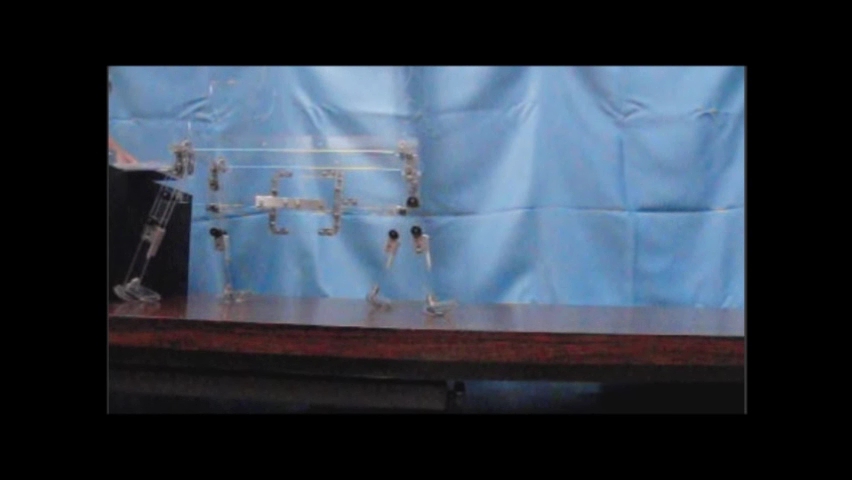 | |||
| Mov.3 Experimental result of the produced robot ※動画を見る際はタイトルをクリックして下さい. |
|||