 |
| 現在までに開発されている多くの二足歩行ロボットは人間と比べて歩行によるエネルギー効率が劣る.そこで最近,歩行効率の良い受動歩行ロボットの研究が行われている.しかし,受動歩行は歩行の継続が可能となる初期条件等は試行錯誤的に求めなければならないという問題がある.本研究では,まず遺伝的アルゴリズムを用いることで歩行の継続が可能となる初期条件を求める方法を提案した. さらに,平面での歩行を可能にするため,腰部に取り付けたモータにより歩行に必要なエネルギーを与えることで平地歩行を可能とするモデルを考えた.そして,遺伝的アルゴリズムを用い歩行の継続が可能となる制御ゲインを求めた. | |||
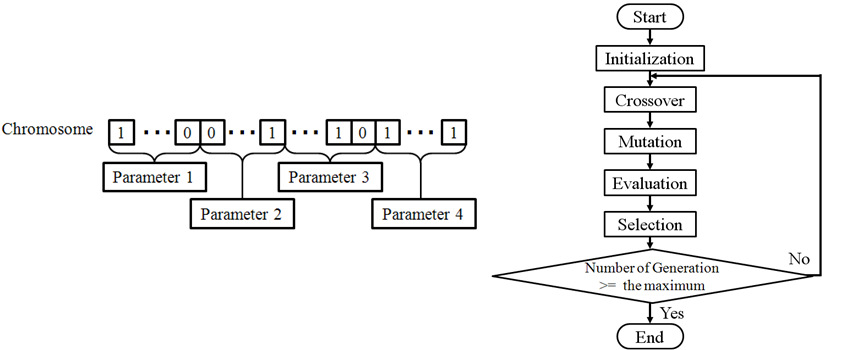 | |||
| Fig.1 The genotype in genetic algorithm Fig.2 The genotype in genetic algorithm | |||
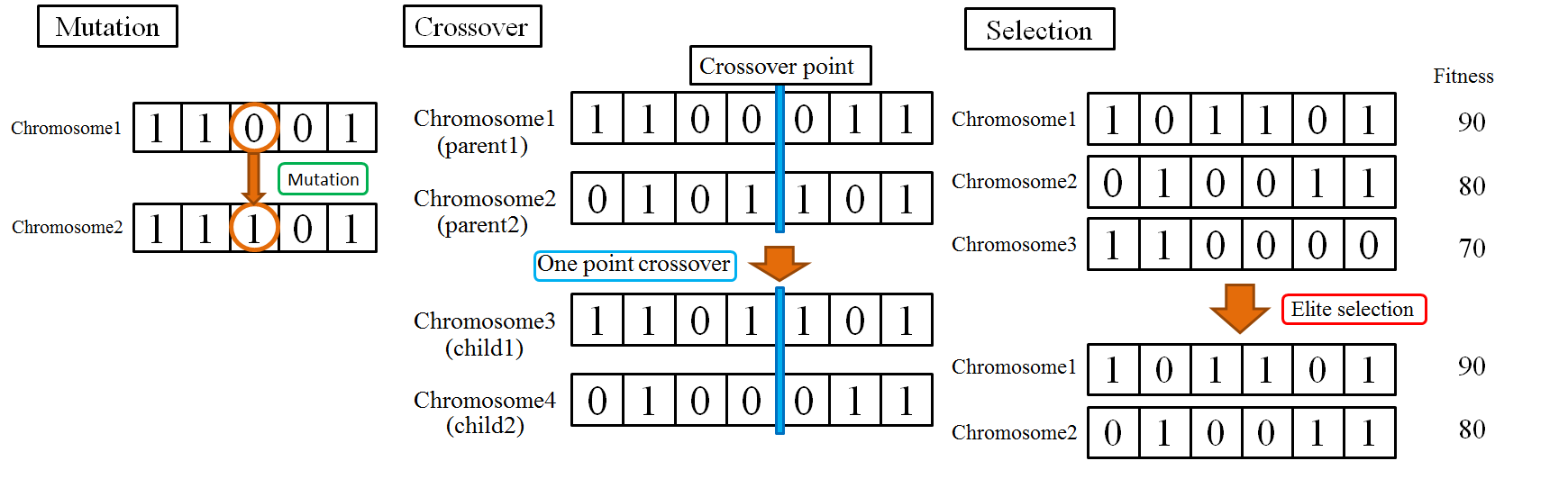 | |||
| Fig.3 Examples of genetic operators | |||
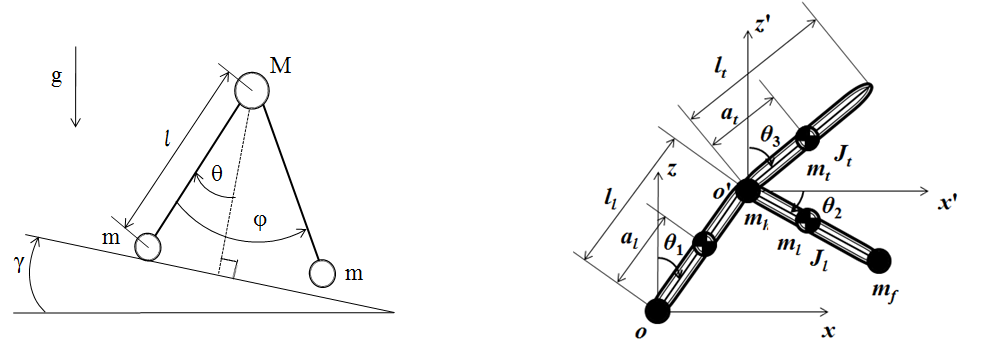 | |||
| Fig.4 Analysis model of a biped passive-walking robot Fig.5 Analysis model of a biped walking robot with the torso | |||
  | |||
| Mov.1 Walking motion in initial generation Mov.2 Walking motion in initial generation Mov.3 Walking motion in 100th generation Mov.4 Walking motion by PD control in 100th generation ※動画を見る際はタイトルをクリックして下さい. |
|||