 |
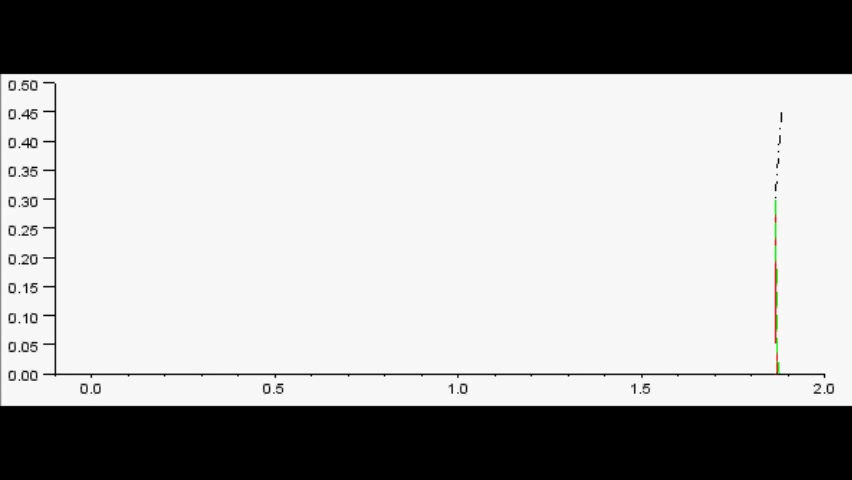
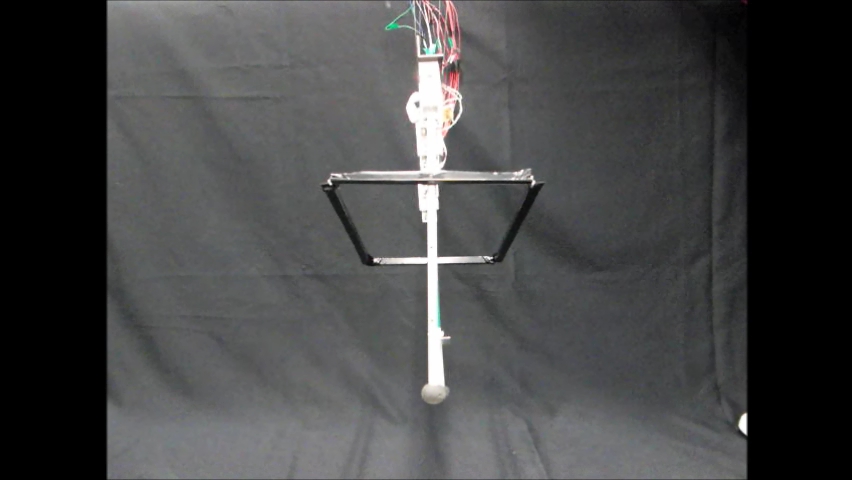
| 本研究の目的は効率良く歩行するロボットを開発することである.現在,ロボットの歩行効率を向上させるために受動歩行ロボットが研究されている.受動歩行ロボットにはモータ等のアクチュエータが取り付けられていないため,平地を歩行することが困難である.そこで本研究では,受動歩行ロボットの腰関節部にアクチュエータを取り付けることで,平地を効率良く歩行するロボットを開発することを目的に研究を行っている.目的を達成するために,コンピュータ・シミュレーションと歩行ロボットの開発を行っている. 図1はコンピュータ・シミュレーションのモデル,図2は開発した歩行ロボットである.コンピュータ・シミュレーションでは歩行ロボットを比例・微分制御することで平地での歩行を実現した.動画1は平地での歩行の様子である.コンピュータ・シミュレーションの結果を参考にして,歩行ロボットの開発を行った.動画2は開発した歩行ロボットの動作実験の様子である.また,動画3は歩行ロボットの両足および胴体の角度の計測実験の様子である.図3は角度の計測実験の結果である.今後は開発した歩行ロボットを用いて歩行実験を行う予定である. | |||
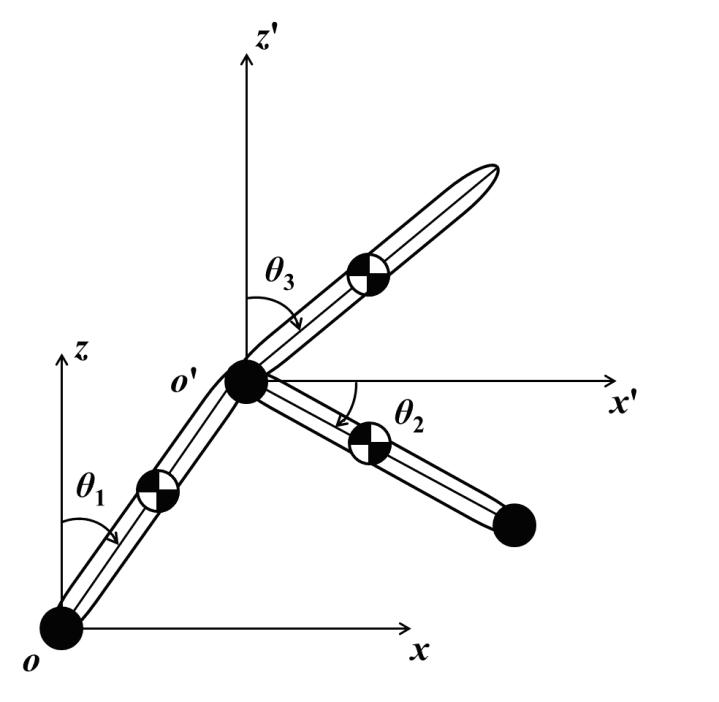 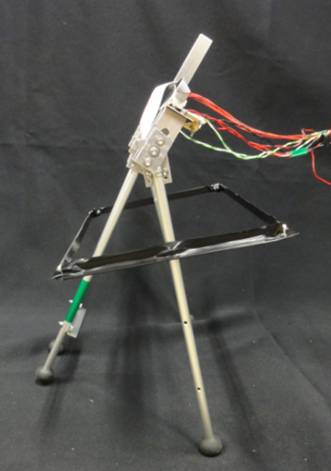 | |||
| Fig.1 Analysis model Fig.2 Experimental robot | |||
  | |||
| Mov.1 Walking motion using proportional-differential control Mov.2 Motion experiment with experimental robot ※動画を見る際はタイトルをクリックして下さい. |
|||
 | |||
| Mov.3 Measurement experiment of angles of both leg and torso leg and torso ※動画を見る際はタイトルをクリックして下さい. |
|||
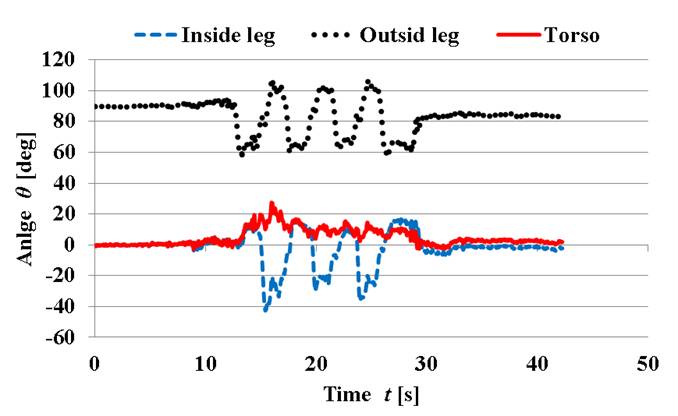 | |||
| Fig.3 Result of measurement experiment of angles of both | |||