 |
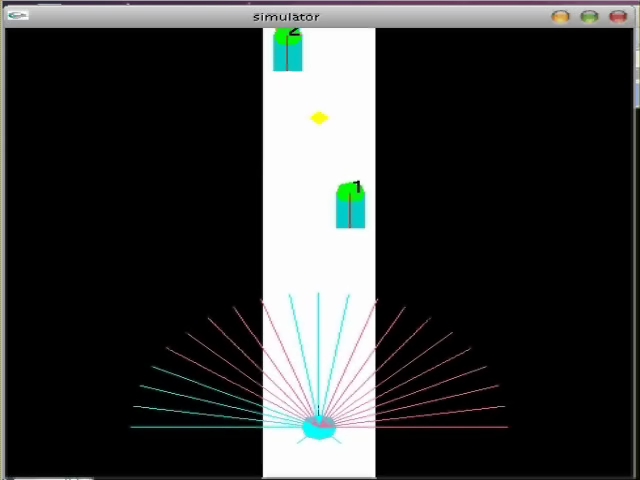
| 本研究では,人が直感的に行う移動に関する行動や,習慣を移動車ロボットの行動に取り入れることを目的としている.そこで,人が行動する際に持っているとされる,衝突を回避するための瞬間的な経路計画に着目し,LRF(Laser Range Finder)を搭載した移動車ロボットが,安全な方向を探索し,移動車ロボットの進行方向を決定する衝突回避システムを開発することとした.さらに,人の感覚である曖昧さを考慮してルールを決定することができるファジィ理論]を用いることにより,人の直観的な判断に基づく効率的な回避行動の実現を目指した.そして,開発したアルゴリズムを用いて衝突回避の計算機シミュレーション(Mov 1)と実験(Mov 2)を行った. | |||
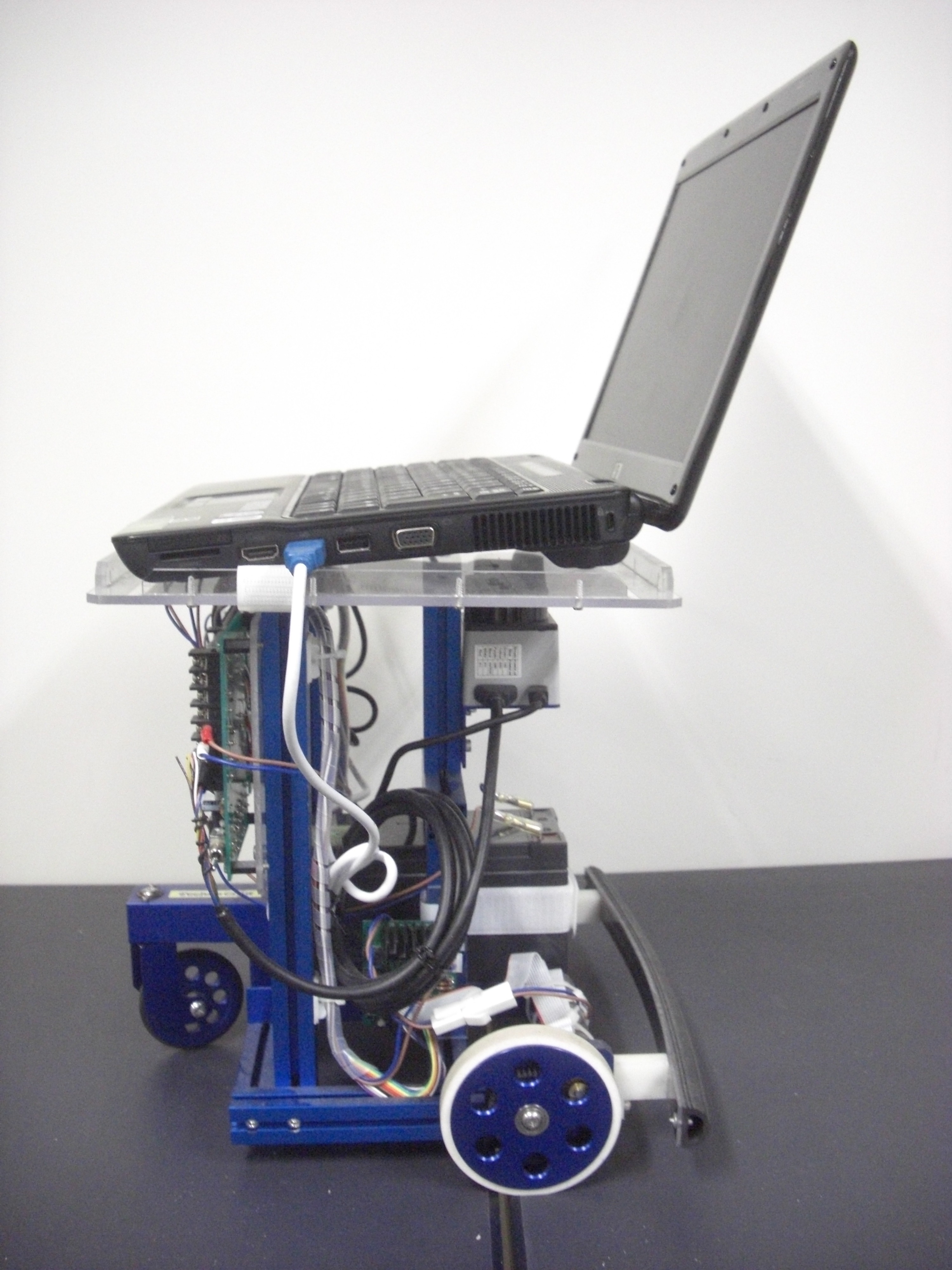 | |||
| Fig.1 mobile robot | |||
  | |||
|
Mov.1 result of simulation
Mov.2 result of experiment ※動画を見る際はタイトルをクリックして下さい. |
|||