 |
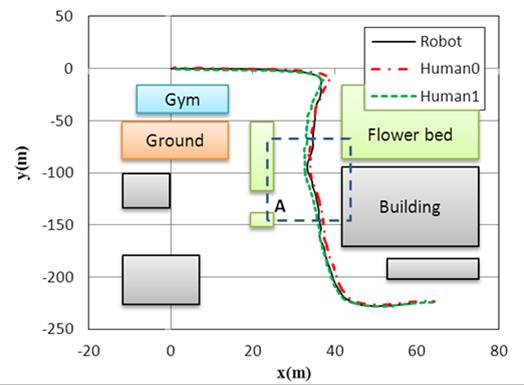
| 近年,屋外支援ロボットの研究が様々な分野にわたって行われている.今後さらに人間とロボットが同じ空間を共有することを考えると,ロボットには人間の動きを認識する技術が必要となる.そこで本研究では,屋外で人間の動きを認識しながら支援を行う,ロボットの開発を目的としている. 製作した移動車ロボットをFig. 1に示す.この移動車ロボットにはLRF(Laser Range Finder)と呼ばれる距離センサと,全方位カメラと呼ばれる視覚センサを搭載している.そして,それらのセンサ情報に確率的な処理を行うことで安定した人間の認識を可能にした. 提案した手法を用いて約300mの長距離の実験を行った.Mov. 1に実環境の実験動画,Mov. 2に移動車ロボットが人間を認識しているときの実験動画,Fig. 2に実験中の一部の写真,そしてFig. 3(a - b)に移動車ロボットと人間の軌跡の時刻歴を示す. また,移動制御を加えた実験をMov. 3に,実験の一部の写真をFig. 4に示す. 今後は,さらに人間が存在する環境で実験を行う予定である. | |||
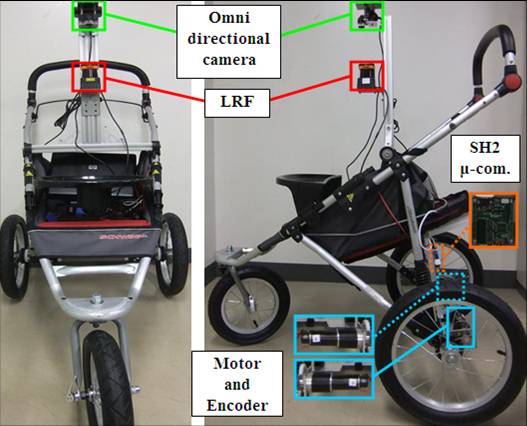 | |||
| Fig.1 The mobile robot developed in this research | |||
 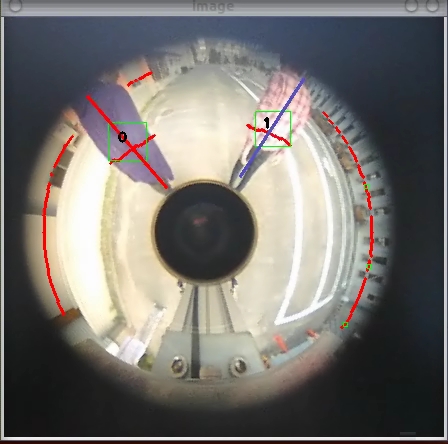 | |||
| Mov.1 The results of recognition by the proposed method Mov.2 Their experimental scene ※動画を見る際はタイトルをクリックして下さい. |
|||
  | |||
|
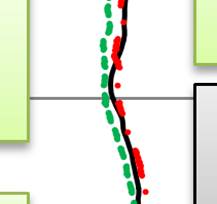
(a) Trajectories of the
robot and running people
(b) Enlarged image of A-part Fig. 3 Experimental result of recognizing running people |
|||
 | |||
| Mov.3 The experimental result of motion control ※動画を見る際はタイトルをクリックして下さい. |
|||