 |
  |
|||
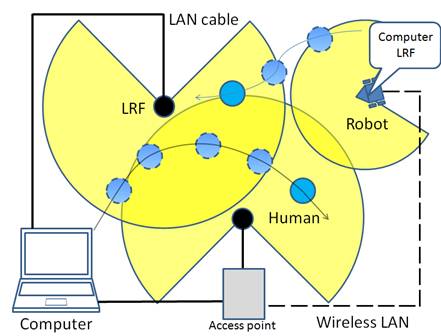
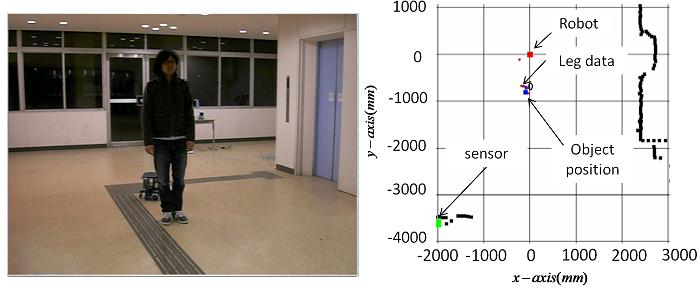
| Fig1. システム構成 Fig2. 実験環境 | |||
 |
|||
| Fig3. 実験風景 | |||
| Mov.1 モニタリング画面 | |||
| 現在,技術の発達に伴い,様々場所での移動ロボットの活躍が期待されている.そういった移動車ロボットが活動を行うためには,移動体などの周囲の,環境情報の取得が重要になってくる.そこで,本研究では固定したLRF(Laser Range Finder)と移動車ロボットに設置したLRF,この複数のLRFを用いて,移動体を区別し認識させ,モニタリングを行うためのシステムを開発した.
まず,2台の固定したLRFで移動体の追跡データを取得し,モニタリングを行った.また,移動車ロボットの位置推定を,ICPを用いて行い,そこで得られた移動体の足のスキャンデータと固定LRFより得られた追跡データの比較結果から移動車ロボットのデータが追跡に利用可能であるかを確認した. |
|||