 |
 |
|||
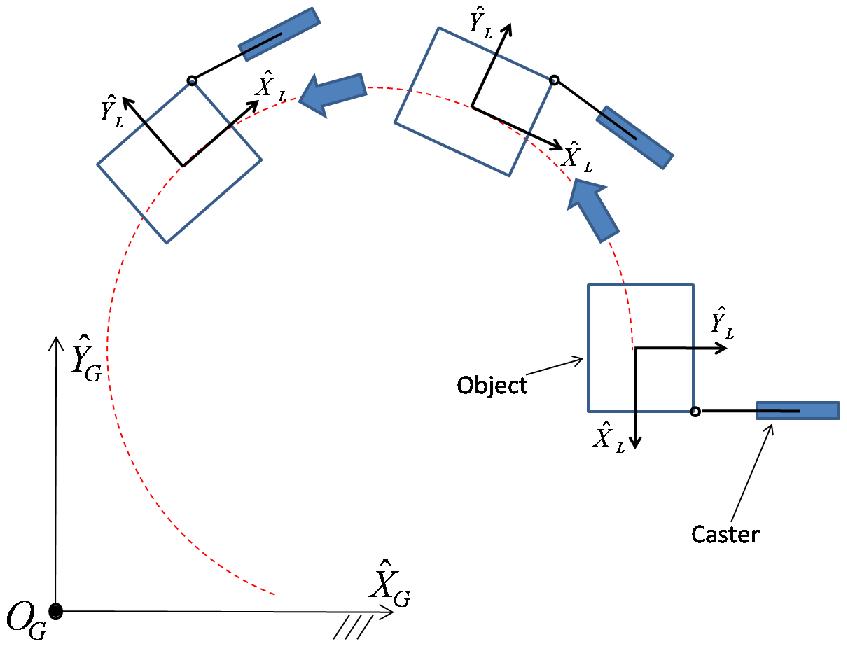
| Fig.1 Motion trajectory of the object | |||
| Animation1 Simulation | |||
| 近年の物体搬送でロボットは欠かせない道具となっている.工場などにある自動搬送車(AGV)がその代表的な例である.一般的な自動搬送車は乗板の大きさによる制限がある.本研究では,新たな搬送方法として,移動させたい物体に直接装着できるアクティブキャスタを用いた搬送方法について研究する.それに伴い,物体搬送の際に正確な制御を行うためには,運動学モデルの核となるアクティブキャスタの装着位置を把握する必要がある.そのためのキャスタモジュールの自己位置推定方法について研究を行った. | |||