 |
  |
|||
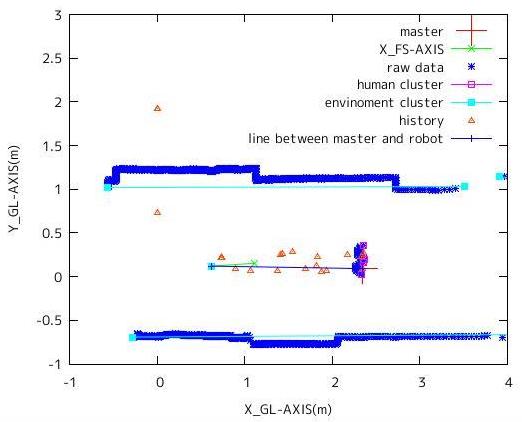
| 図1 追跡対象を追跡中の移動車ロボット 図2 レーザスキャナから取得したデータのプロット | |||
| 動画1 ビデオカメラの映像 動画2 全方位カメラの映像 | |||
| 人間が作業を行う際にロボットが人間を追跡し,支援動作を行うことができれば作業する人間の負担を軽減することができます.本研究で使用した移動車ロボットは独立二輪操舵型であり,ロボットの周辺情報を取得するレーザスキャナから送られてくる情報を用いて人間や障害物を認識し,設定条件に合致する物体を追跡対象とします.同時に,ロボットに搭載された全方位カメラの画像に対して画像処理を行い,追跡対象の色彩的な特徴を取得することでも特定を行います.この二つの追跡対象特定方法によりロボットは追跡対象を含む複数の人間が環境に存在する場合や,追跡対象が他の人間に隠れて瞬間的に見えなくなった場合でも安定して追跡対象を認識できます.このようにロボットが安全かつ正確に人間を追跡できるようにすることが目的です.
図2はロボットが屋内廊下において人間を追跡しているときのレーザスキャナから送られてくるデータのプロット図です.原点付近の点がロボット,その右側の二つの半円状のプロットは人間の両足です. 動画は複数の人間がロボットと追跡対象の周囲を歩行している様子です.このように追跡対象の傍を他の人間が通過したり,ロボットと追跡対象の間を横切ったりしても安定して追跡できていることが分かります. |
|||