 |
| 近年,技術の発達により,様々な場所での移動車ロボットの活躍が期待されている.工場や駅,パーティ会場などの人の活動する場所において,より広く環境を知ることが大切であると考えられる.そこで,本研究では屋内と移動車ロボットに設置したLRF(Laser Range Finder)の複数のセンサを用いて歩行者を認識するシステムの開発を目的とした. 移動車ロボットの位置推定を,パーティクルフィルタを用いて行い,屋内に設置したLRFと移動車ロボットに設置したLRFによる歩行者の追跡データを取得し,モニタリングを行った. | |||
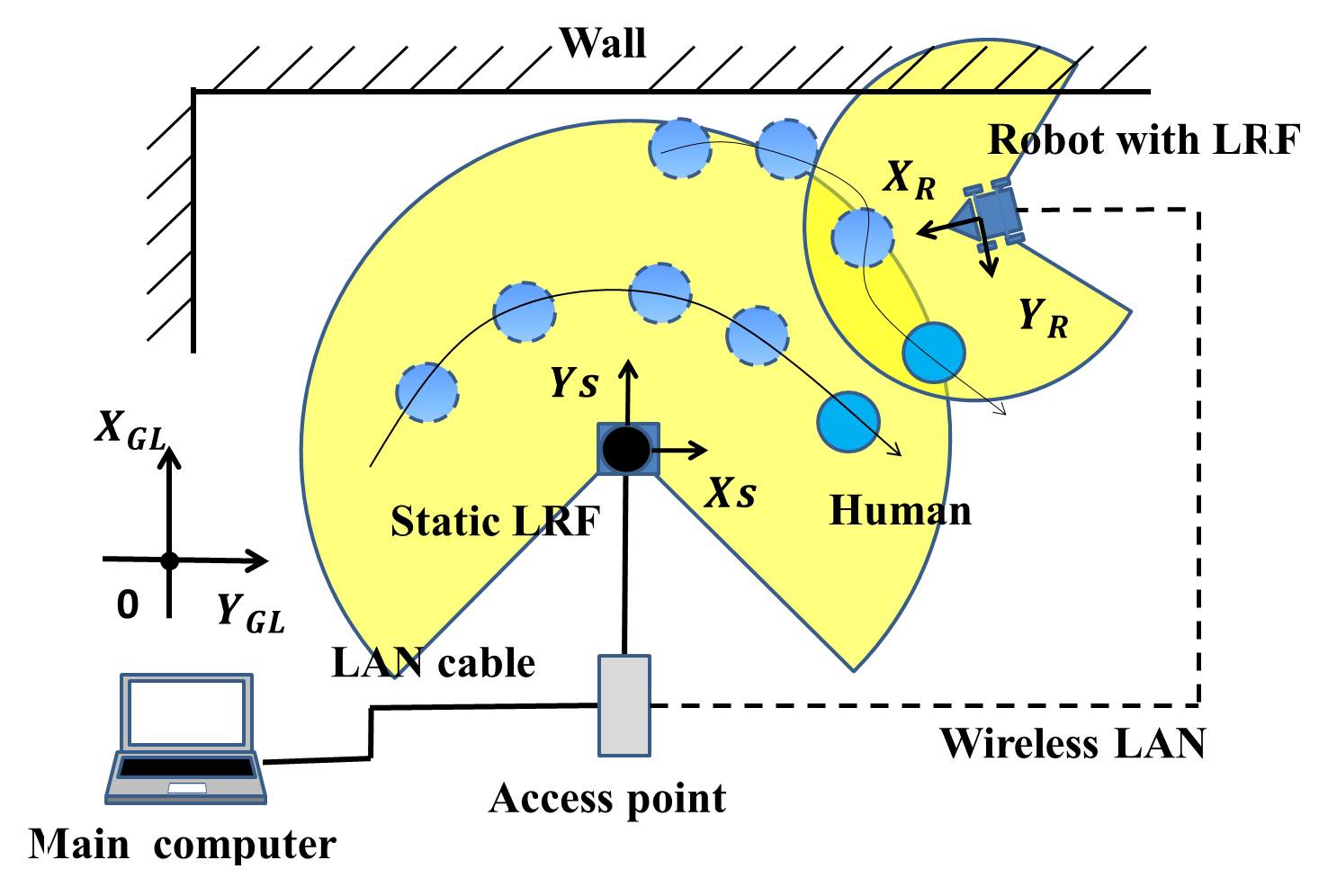  | |||
| Fig.1 システム構成 Fig.2 システム | |||
 | |||
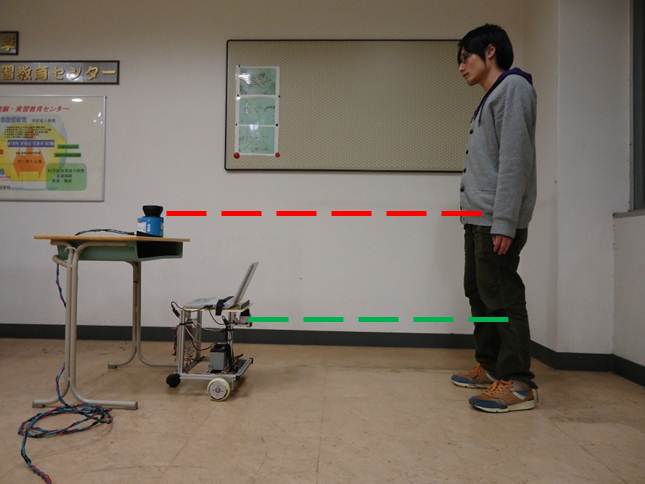
| Fig.3 実験風景 | |||
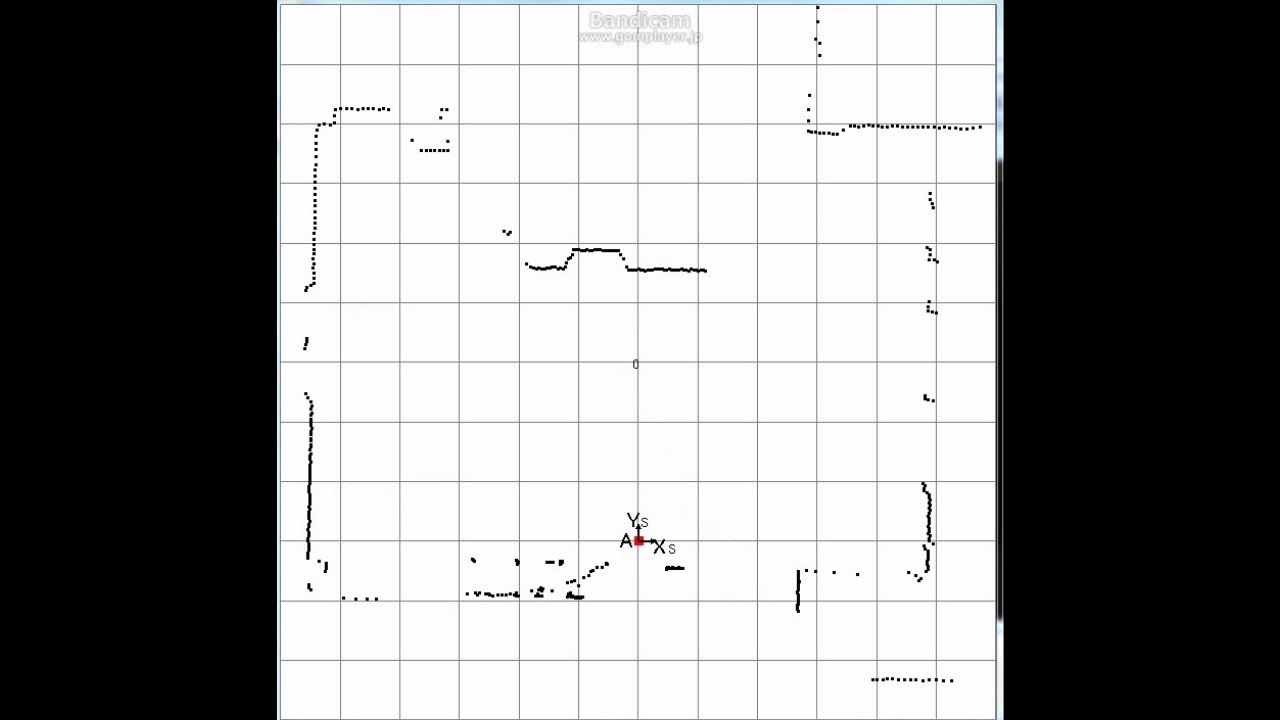 | |||
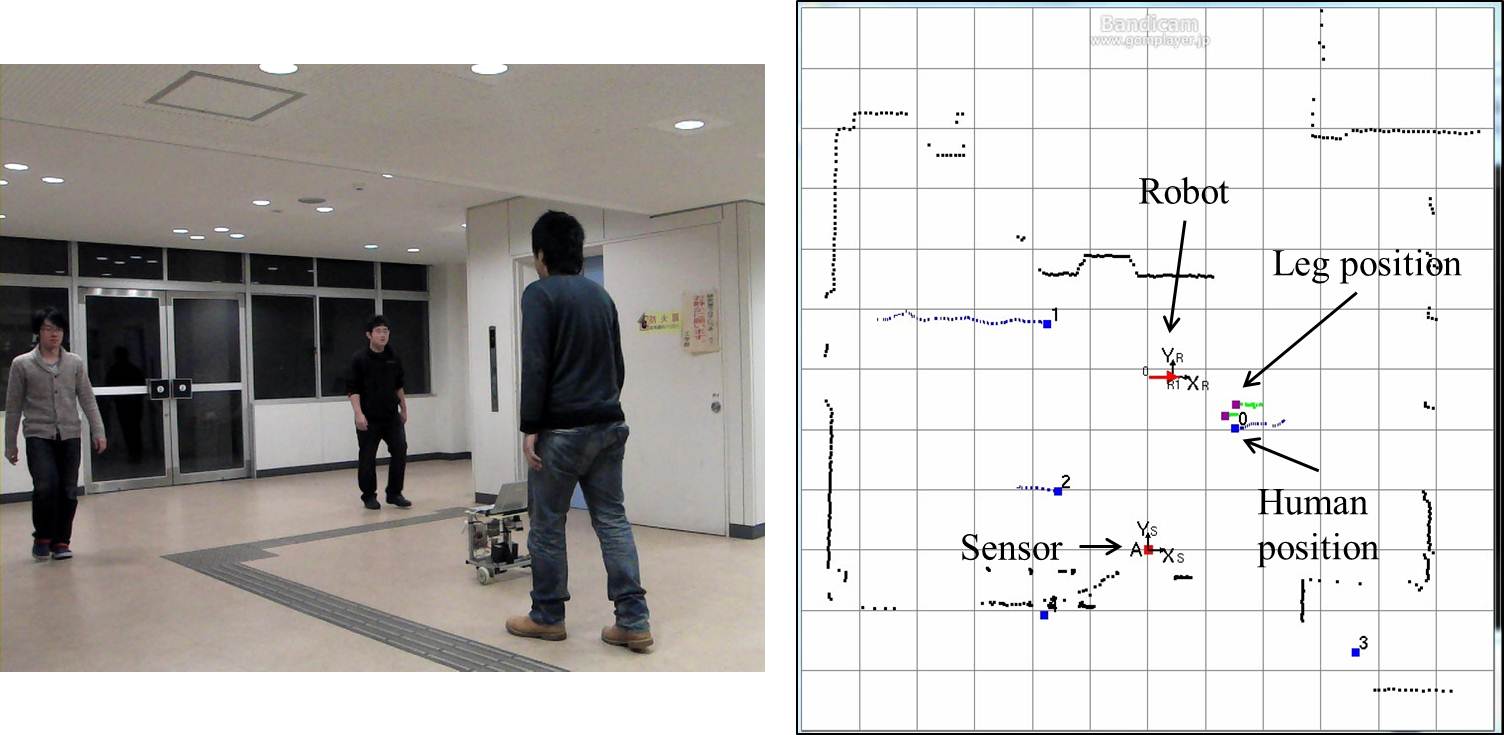
| Mov.1 実験結果 ※動画を見る際はタイトルをクリックして下さい. |
|||