 |
| ロボット技術の発展と共に人間が生活する環境で自律走行を行い,人間をサポートするロボットが活躍の幅を広げている.しかし,現在実用化されているロボットの多くは,インフラ設備を必要としており,一度設置を行うとその変更は容易ではない.このようなインフラ設備を必要としないロボットの自律走行を支援する方法として,地図を使ったナビゲーションが存在する.人間の生活する環境ではロボットは多くの人工物に囲まれるため,周囲には単調な面が多く存在することになる.この点に着目し,環境に存在する面を認識し地図を作成することで,ロボットの位置推定や経路選択に応用が可能であると考えた. 図1は本研究で開発したロボットである.外界センサとして3次元スキャン装置を搭載している.図2は屋外環境で行った平面認識実験の結果である.動画1は廊下にて作成した地図である. | |||
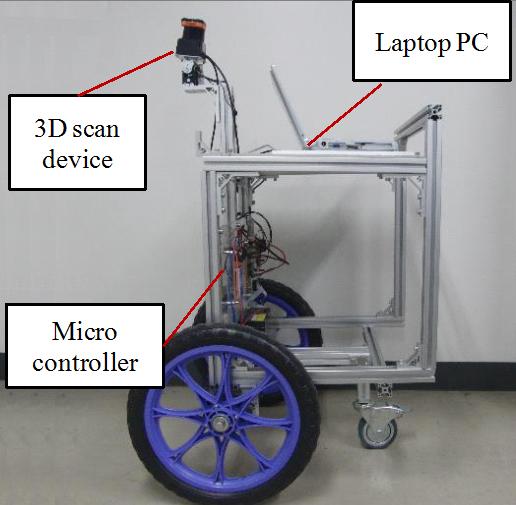 | |||
| Fig.1 Mobile robot developed in this research | |||
 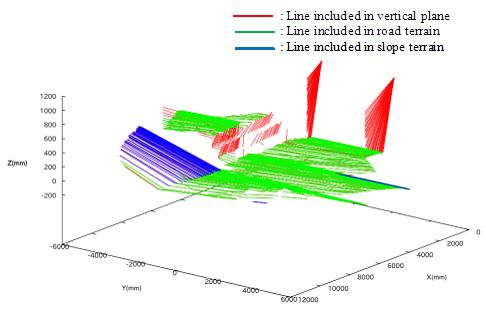 | |||
| (a) Photograph of the outdoor area near the building (b)
Result of plane classification in the outdoor area near the building Fig.2 Experimental result of plane classification in the outdoor area near the building |
|||
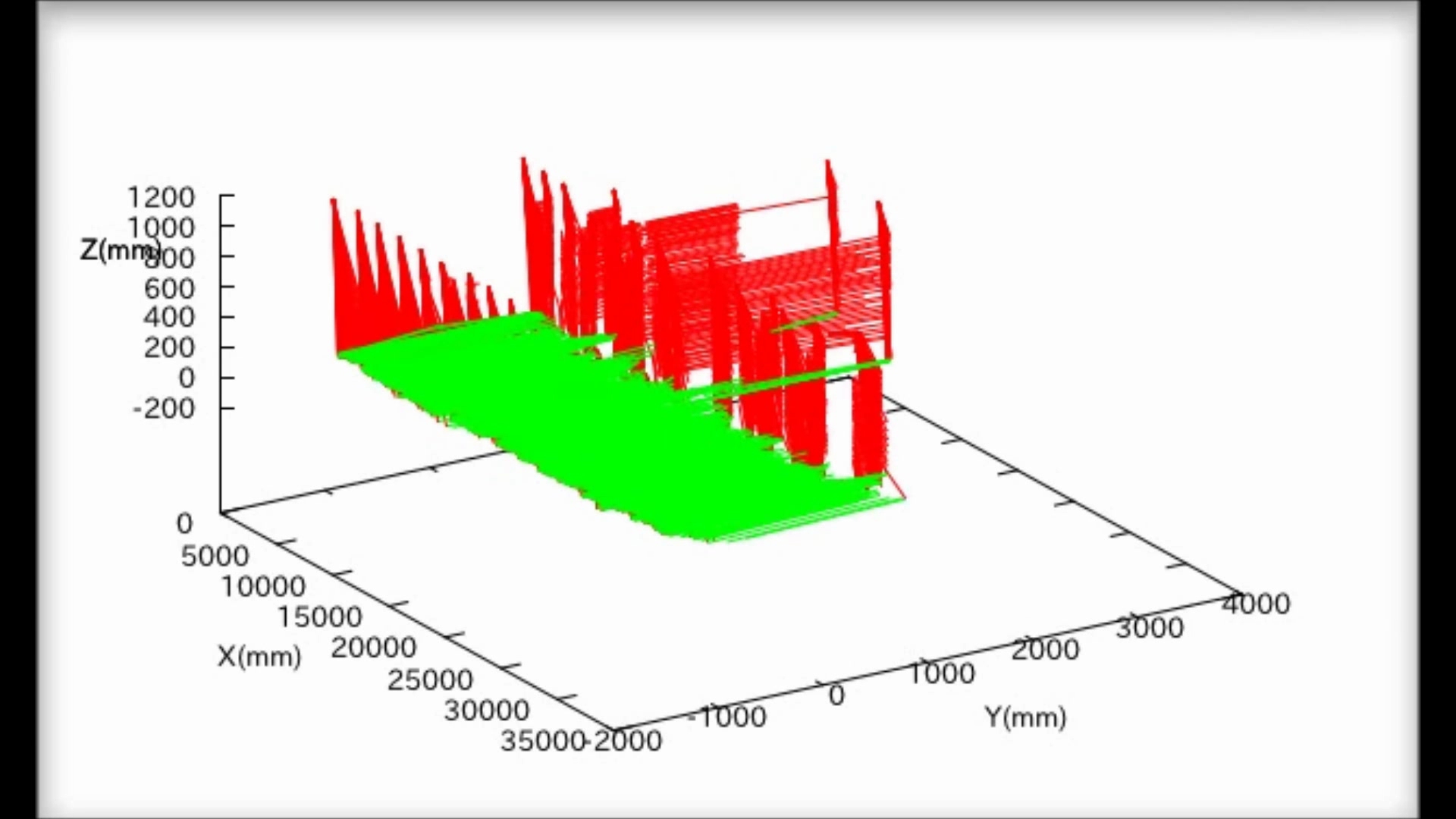 | |||
| Mov.1 Experimental result of mapping with plane recognition using random search
※動画を見る際はタイトルをクリックして下さい. |
|||