 |
 キネクトセンサを搭載した移動車ロボットによる人の動作認識とコミュニケーション キネクトセンサを搭載した移動車ロボットによる人の動作認識とコミュニケーション |
 移動車ロボット分野へ戻る 移動車ロボット分野へ戻る
|
|
|
| 近年の高齢化社会の到来に伴い,ロボットの活躍の場は産業分野のみでなく,福祉分野など人間の身近な場所に広がりつつある.本研究では,人間とロボットとのコミュニケーションに注目し,日常生活で移動車ロボットを運用し,人間とロボットが互いにコミュニケーションを取り合う手段としてKinectセンサと距離センサであるLRFを用いる.直感的に指示を行うことができるジェスチャー認識の機能を移動車ロボットに搭載し,コミュニケーションを通じて日常生活での人間の支援が可能であるか検討することを目的とする.
本研究ではFig.1に示す4種類のジェスチャー(開始,待機,終了,スタンバイ)の識別を行い,各ジェスチャーに応じてロボットを動作させた(人間追跡,壁に寄り待機,開始地点に戻る,ジェスチャー判断).ジェスチャーとロボットの動作との対応をTable
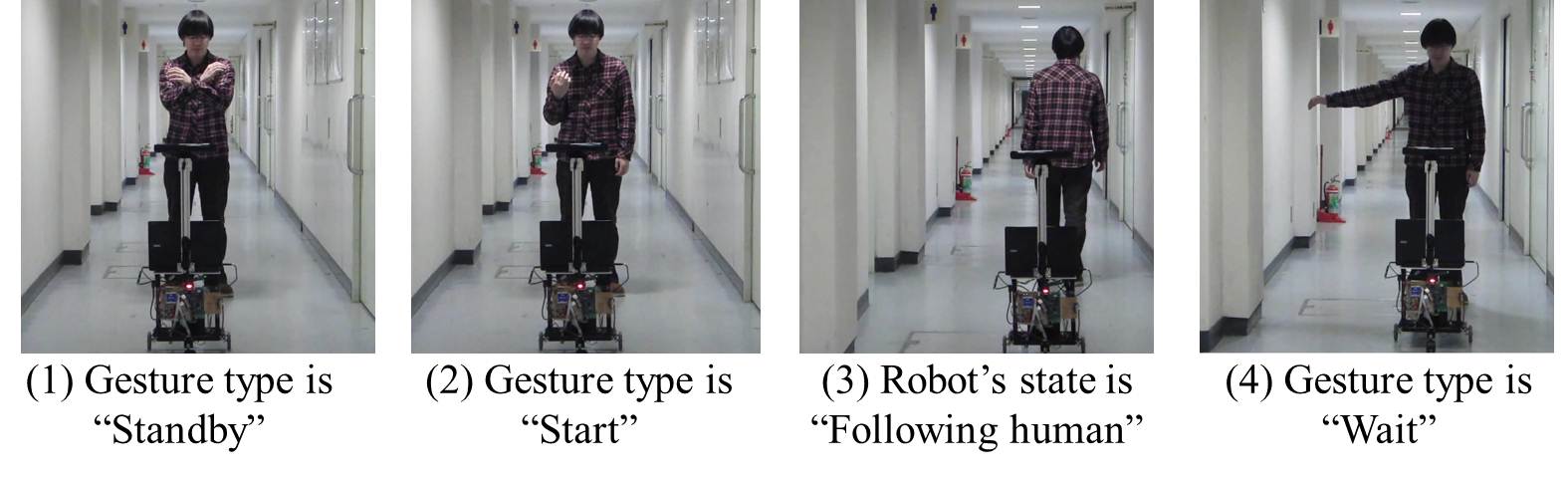
1に示す.また,作成したシステムを移動車ロボットに搭載し動作実験を行い,その時の実験の様子をFig.2に示す.また,実験の動画をMov 1に示す. |
|
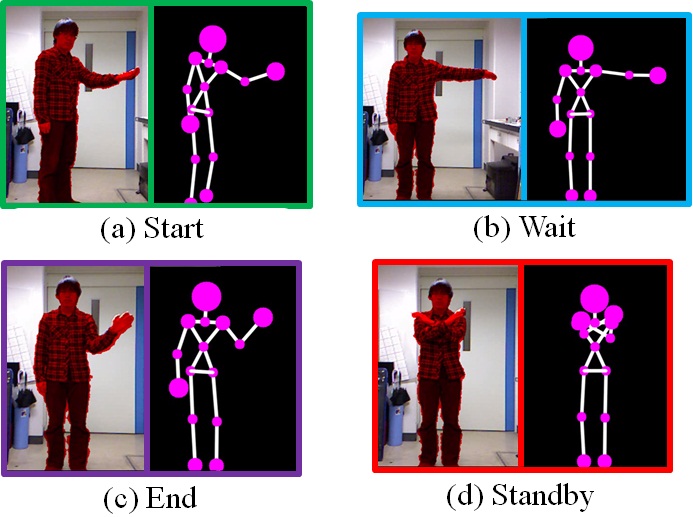 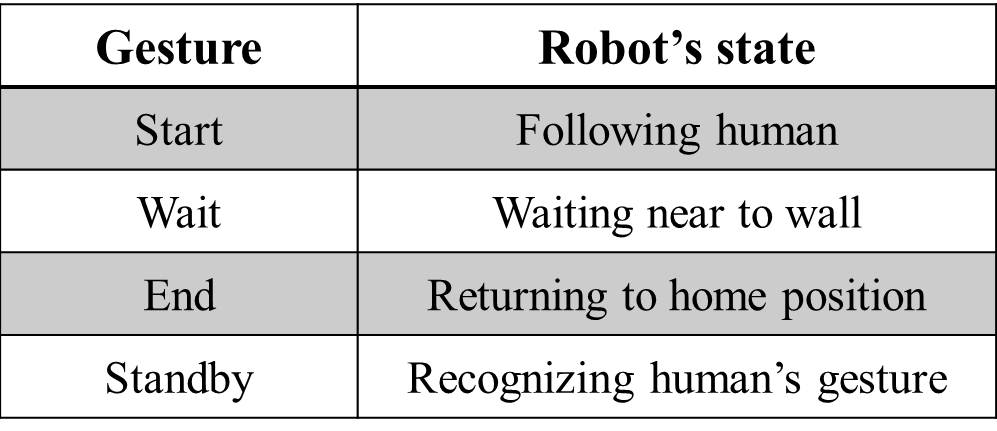 |
| Fig.1 Types of gesture Fig.2 Correspondence
of gesture and robot’s state |
 |
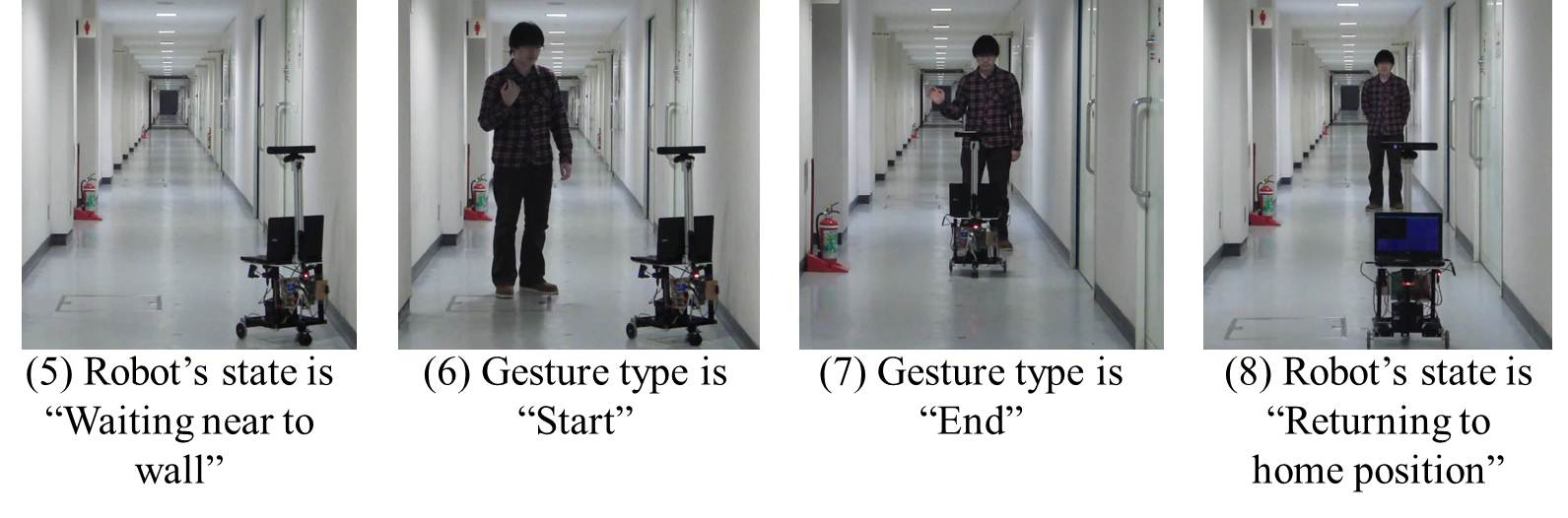 |
| Fig.3 Experimental result |
 |
Mov.1 Experimental result
※動画を見る際はタイトルをクリックして下さい. |
|
