 |
|
|
|||
| (1)事業の目的 本研究事業では,個人用移動装置の様々な運転状況を計測・分析する方法について研究し「運転モニタリングシステム」を開発する.また,得られた測定情報と移動装置及び搭乗者の運動学モデルを用いて,計算機内の仮想空間で再現し運転状況を解析する方法を開発する. (2)実施内容 ①移動装置の周辺状況の認識方法 ア 複数歩行者認識方法開発 移動装置に設置された水平のレーザ・スキャナを用いて,周辺の複数歩行者を 認識する方法を開発した.また,固定及び移動レーザ・スキャナと計算機によって構成されるセンサ・ネットワークを用いて歩行者を認識するシステムを開発した. 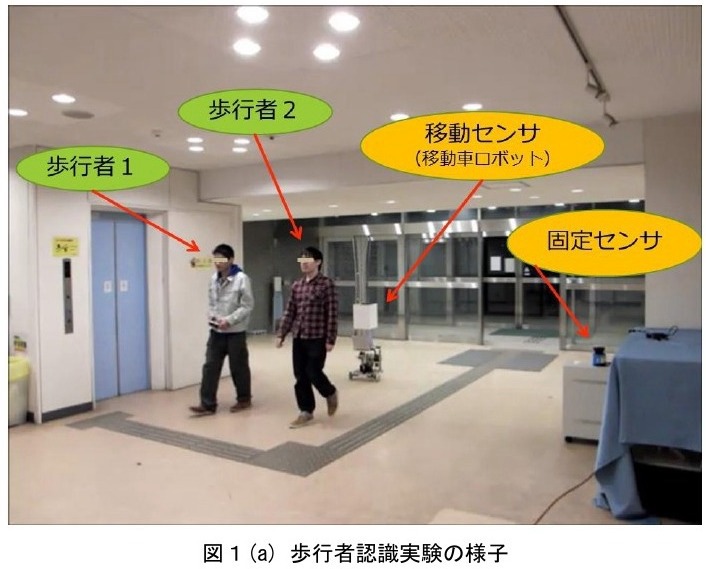 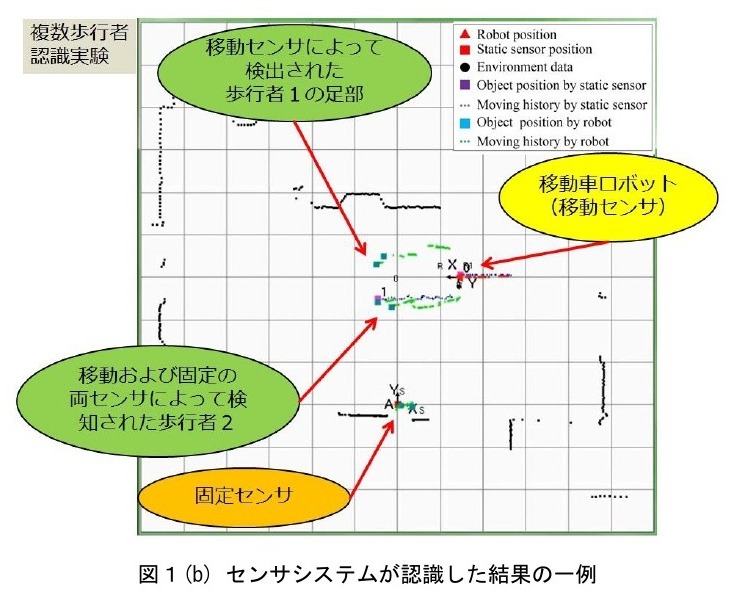 イ 周囲環境の3D測定技術開発 移動装置前方に斜めで設置されたレーザ・スキャナと車輪のエンコーダを用いて移動しながら周辺環境の3次元データで測定する技術を開発した. 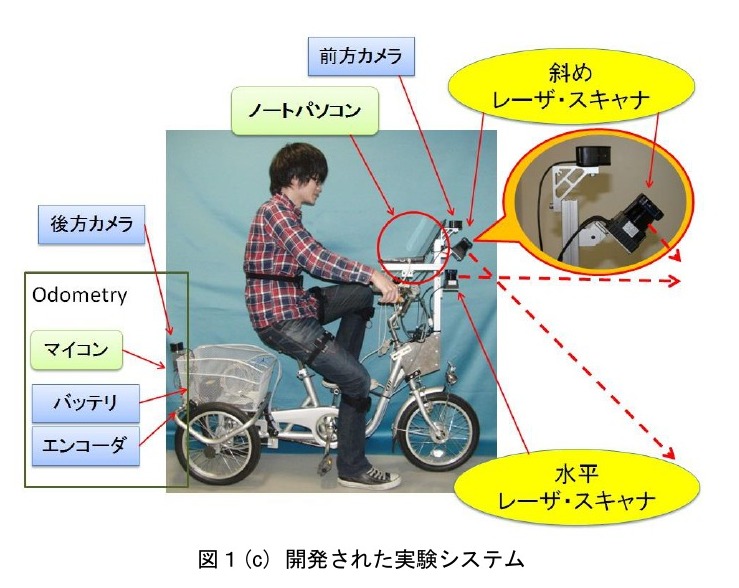 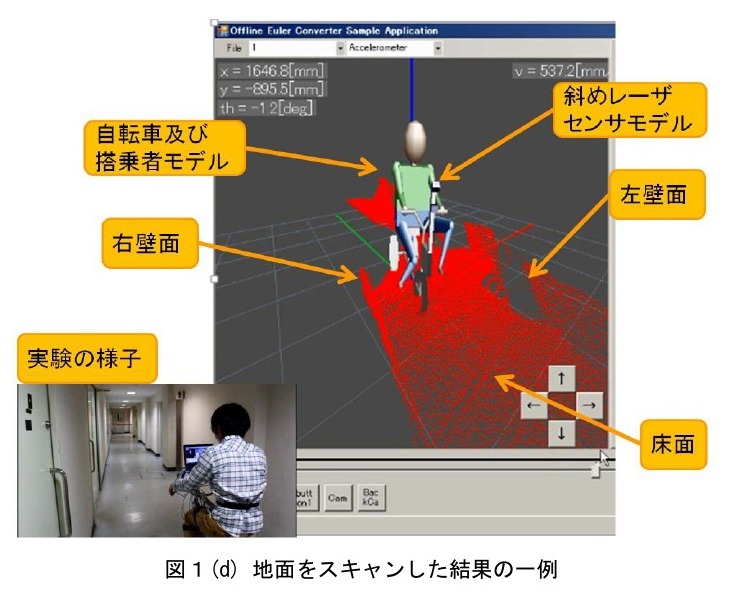 ②搭乗者の運転行動の計測技術開発 複数のモーションセンサを搭乗者の人体に付着し測定することによって,運転行動において各関節とリンクごとの動きを実時間で計測する技術を開発した. 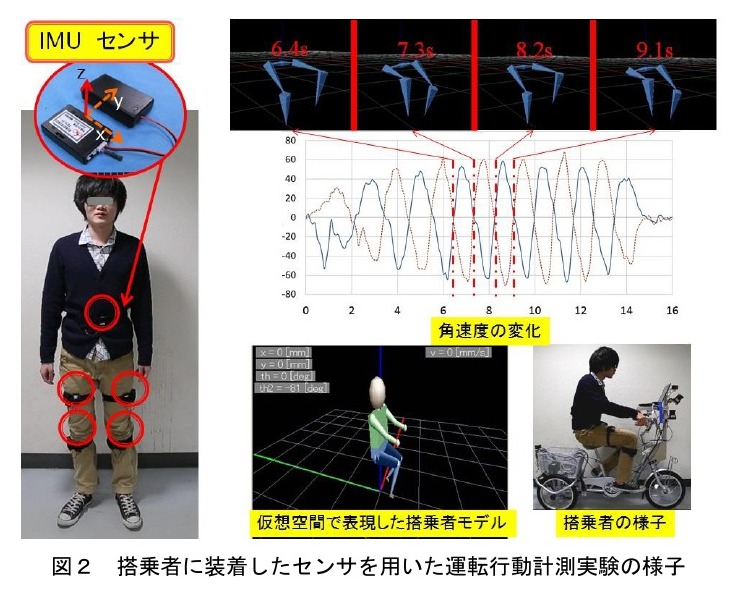 ③移動装置の運転状況記録及び仮想空間での再現ソフトウェア開発 運転中に様々なセンサから得られた測定データの実時間での記録と,コンピュータ・グラフィックスによって計算機内の仮想空間で再現するソフトウェアを開発した. 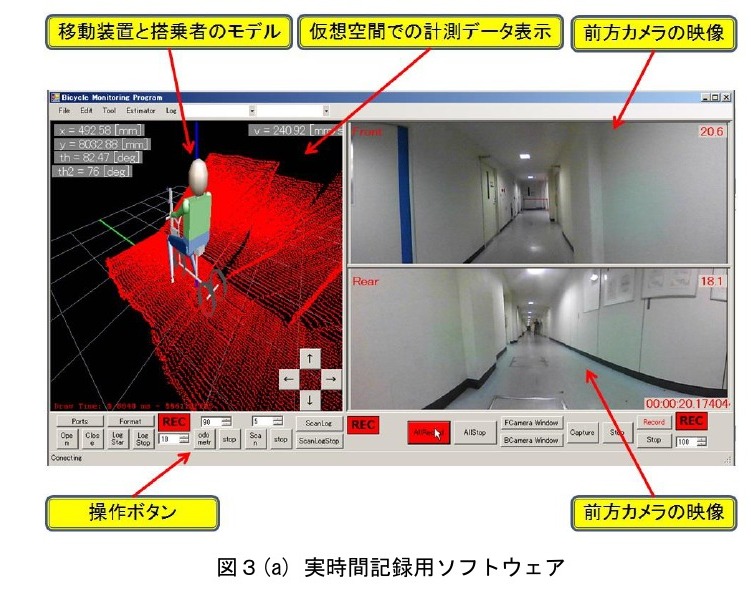 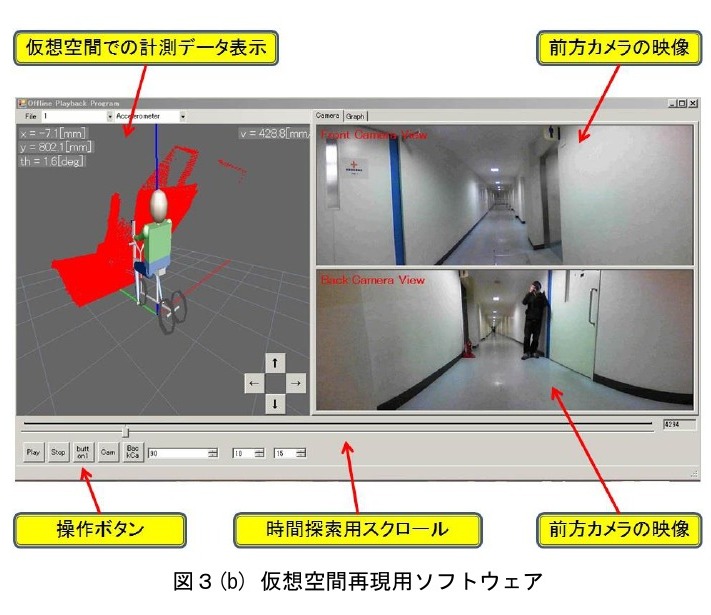 ④移動装置の安全度判断方法開発 移動装置周辺の歩行者の位置及び速度情報を用いて,移動装置との衝突が起こる可能性を判断するためのファジ理論基盤の安全度推定アルゴリズムを開発し,製作した実験用自転車システムを用いて検証した.また移動車ロボットの衝突回避ナビゲーションにも応用した.  |
|||