 |
モニタリング・システムの開発 |
|||
  |
|||
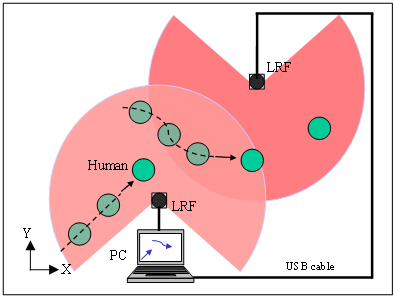
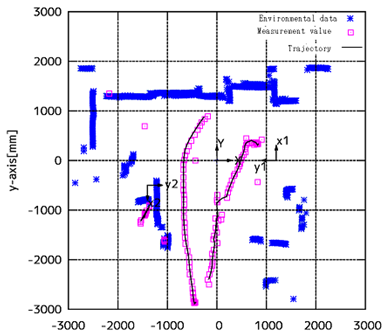
| Fig1.System configuration Fig2.Example of experiment | |||
 |
|||
 |
|||
| 現在,人間を検知し認識する技術が様々なニーズのために研究されている.例えば,不審者の建物への侵入を検知する技術や,店舗での消費者の行動を分析する技術などがある.
本研究では,これらの人間の行動解析に応用できるシステムの開発を目指している.対象物までの距離と角度を測定できるURGセンサを使い二次元平面をスキャンし,屋内における移動体を検出しその動きを追跡する.
上図に示すように屋内にLRFを設置し,移動体を追跡しその様子をパソコンのディスプレイに表示する.人間を追跡する場合LRFを人間の腰付近の高さに設置してスキャンを行う.複雑な人間の動きを追跡するためにカルマンフィルタを用いた.2,3人程度ならば十分追跡できるが,多くの人間が密集している場合は追跡が難しく今後の課題となっている. |
|||