 |
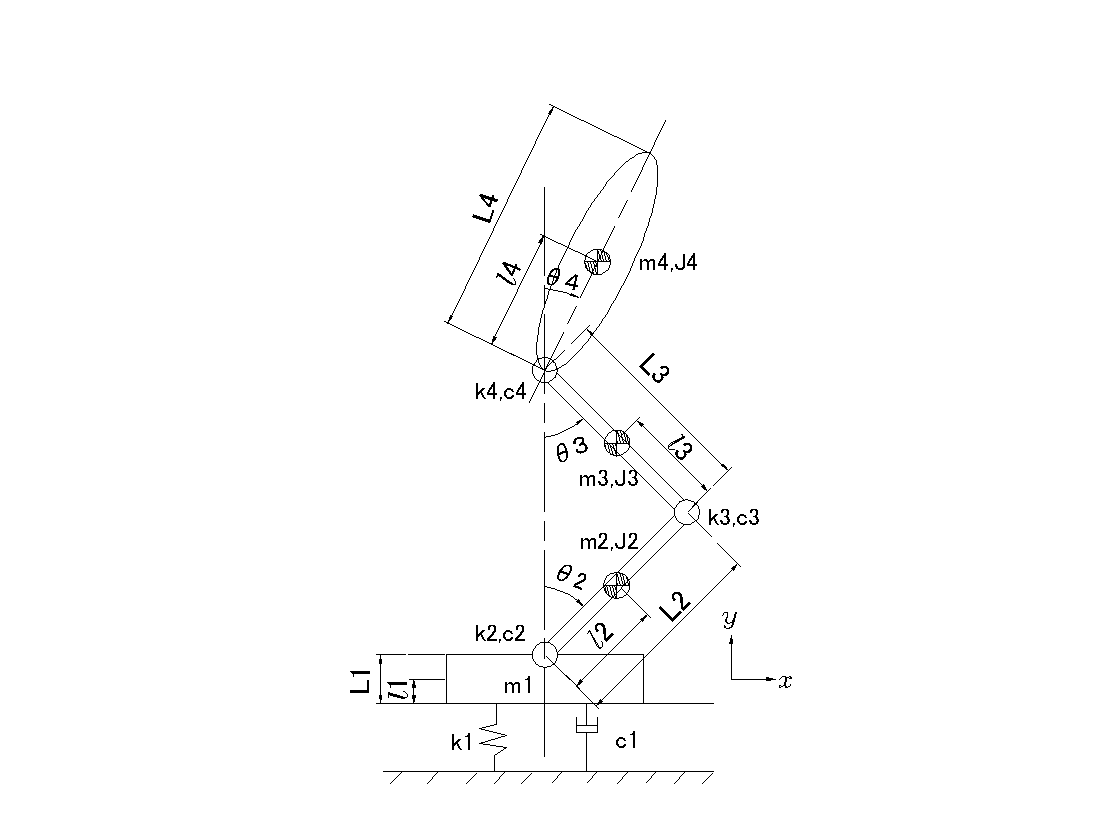 | |||
| Fig1 Simulation model | |||
| Fig2 Simulation example | |||
| 人間型ロボットの研究の中でも,歩行に関する研究はとても重要なものであり,現在も多く課題を抱えている.その課題のひとつに,着地時に生じる衝撃をどのように制御し緩和するかという問題がある.走行や跳躍をする際に生じる衝撃は非常に大きく,ロボットの故障や転倒の原因となる.
本研究は,人間型ロボットが歩行や着地時に受ける衝撃を緩和または制御することを目的としている.そのためにまず,人間の着地運動の計算モデルを作成し,その運動方程式の導出を行った.次に,導出した運動方程式をもとに落下のシミュレーションを行うプログラムを作成した. |
|||