 |
 |
|||
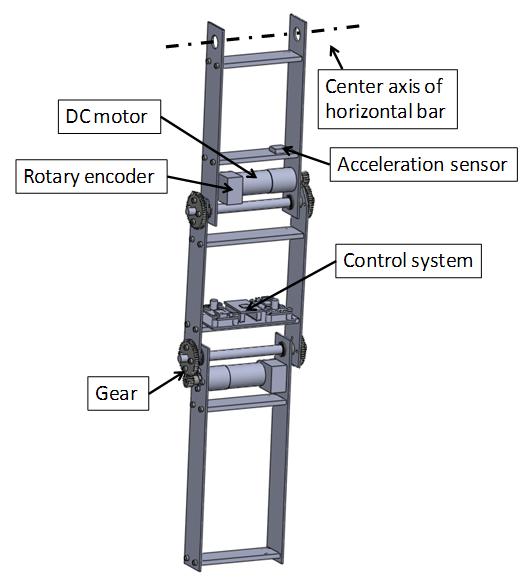
| Fig.1 Composition of three-link robot | |||
 |
|||
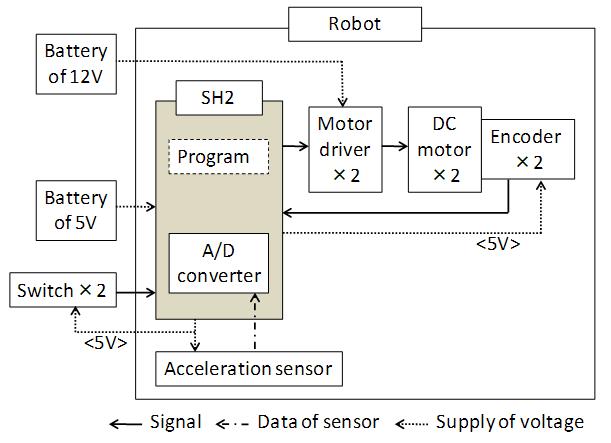
| Fig.2 Composition of robot system | |||
| Animation1 Horizontal bar movement of three-link robot by autonomy | |||
| 本研究では,ロボットに鉄棒運動をさせることを目的としています.まず,鉄棒運動に関する動力学シミュレーションを行い,鉄棒運動の軌道について検討します.次に,ロボットの設計・製作を行い,自律的に鉄棒運動を行わせています. | |||