 |
 遺伝的アルゴリズムを用いた経路計画シミュレーション 遺伝的アルゴリズムを用いた経路計画シミュレーション |
 ヒューマノイド分野へ戻る ヒューマノイド分野へ戻る
| |
|
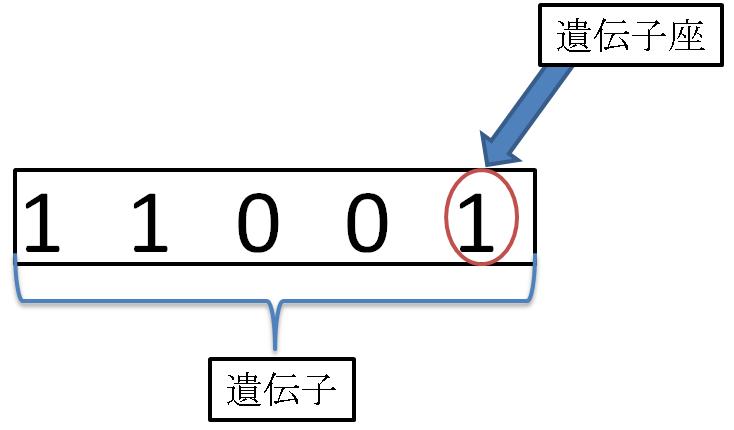 |
| Fig.1 Example of gene. |
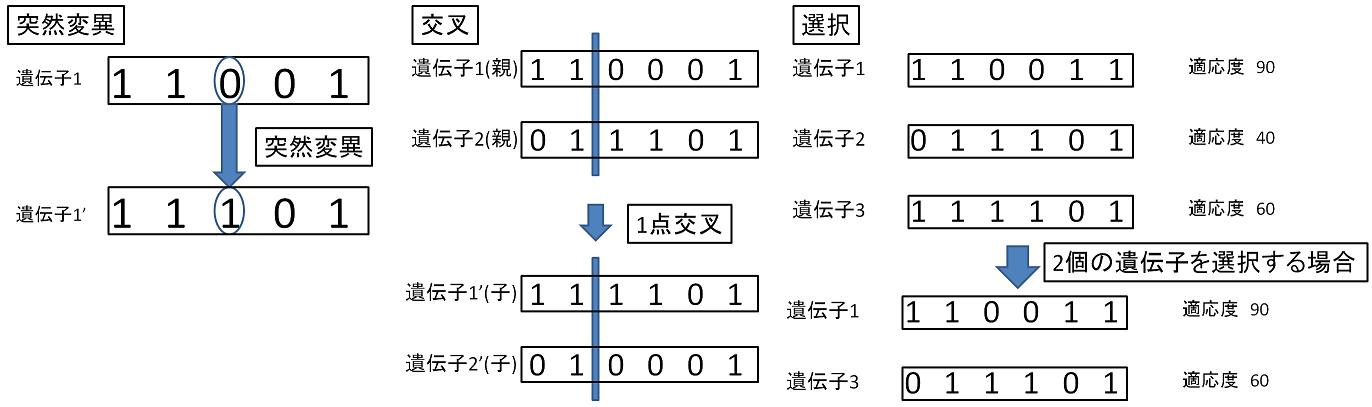 |
| Fig.2 Example of genetic operator |
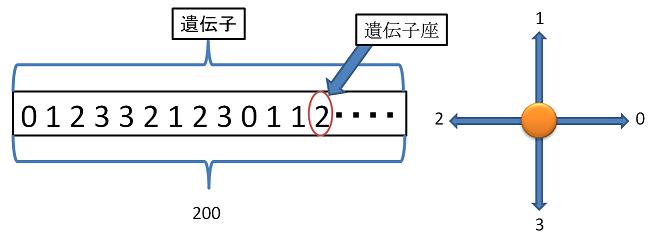 |
| Fig.3 Example of gene about route planning |
 |
| Fig.4 Starting and target points in the campus of Ehime univ. |
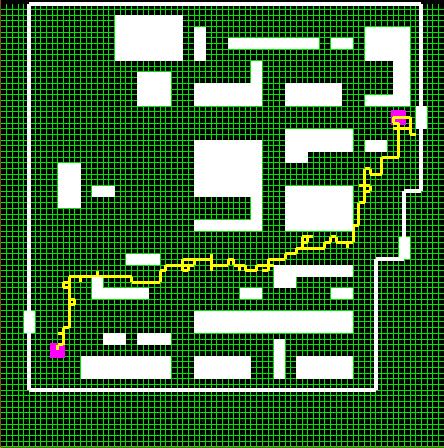 |
| Fig.5 Route in 10,000th generation |
|
近年ロボットが自立走行を行うようになっています.ロボットが自立走行するためには,ロボット自身が地図情報と目標位置を与えられた上で,目標位置に到達出来るよう経路を計画しなければなりません.そのためには,地図情報にグリッドを設けそのグリッド上を移動すると考えた場合,経路の総数は大幅に増えてしまいます
さらに大幅に増えた経路を全て計算した上で最適な経路を選択するには,膨大な時間がかかってしまいます.そのため,いかに早く最適な経路を選択することが出来るかが重要だと考えられます.
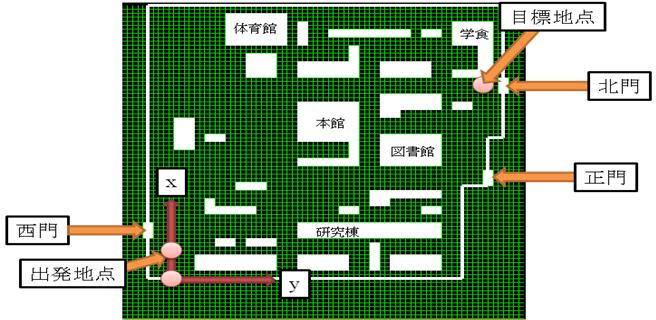
本研究では,最適な経路を選択する時間を短縮するために遺伝的アルゴリズムを用い,経路計画シミュレーションのプログラムの開発を行いました.その応用例として愛媛大学構内での経路計画シミュレーションを行いました.Fig.4は,愛媛大学構内の出発地点と目標地点,障害物の場所を示しています.
このシミュレーションでは,経路が出発地点から障害物を回避しながら目標地点まで最短距離で到着することを目的としています.Fig.5は,10000世代プログラムを走らせた場合の経路の結果です.この経路を見ると,経路が出発地点から障害物に侵入することなく目標地点まで最短に近い距離で到着していることを確認できます.
また遺伝的アルゴリズムが優れているかを確認するために,時間による検証を行いました.本研究では,クロック周波数が1.66GHzのパソコンを使用しました.まず遺伝的アルゴリズムを用いなかった場合では,全ての経路を計算した上で最適な経路を選択する必要があります.そのためには,時間が1.26×10^99億年かかります.
遺伝的アルゴリズムを用いた場合では,3.43分で最適な経路を選択することが出来ました.このことから遺伝的アルゴリズムが優れていることを確認できました.
|
