 |
| 現在,ロボット分野では,人間の走る動作をロボットで実現させるために二足歩行ロボットの研究や開発が行われている.走る動作の定義とは両足が地面から離れる時間の存在する移動方法のことを言う.つまり,走行とは歩行にホッピングを加えたものだと考えることができる.本研究では,ロボットに人間と同じように走行を行わせるための基礎研究として,ホッピングロボットの研究と開発を行った.ホッピングロボットのモデルはAhmadiら の論文を参考に,2つのリンクと2つのばねから構成される一本足型のホッピングロボットを採用した.本研究は,動力学モデルから導いた運動方程式を元に走行のシミュレーションを行い,ロボットを構成する胴部(body)と脚部(leg)の2リンクの内の脚部の開発を行った. | |||
 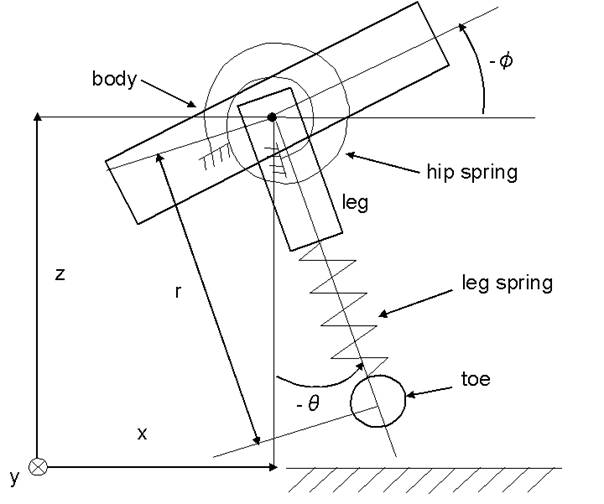 | |||
| Fig.1 解析モデル | |||
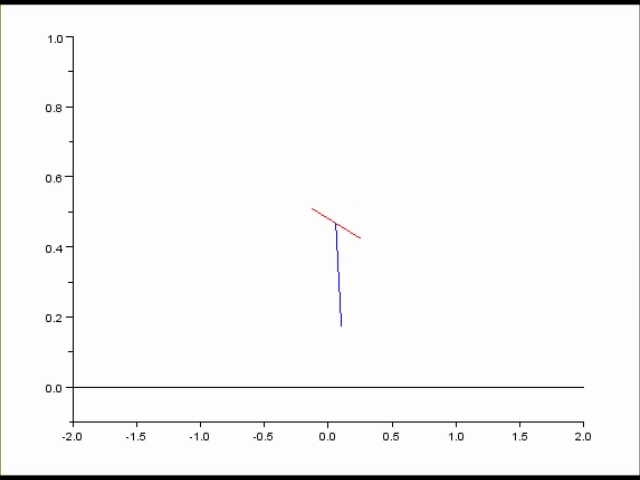 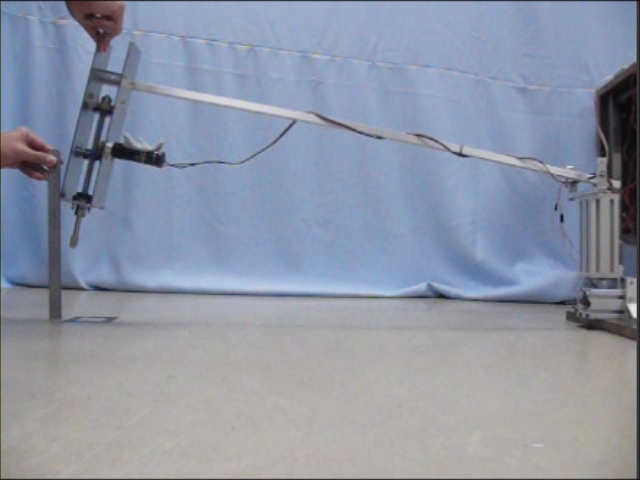 | |||
| Mov.2 コンピュータ・シミュレーション Mov.3 実験動画 ※動画を見る際はタイトルをクリックして下さい. |
|||