 |
| 手に障害を持つ人は日常生活さえ困難な人もいる.手に障害を持つ人は義手を装着することで生活が便利になる.本研究ではアクチュエータとして形状記憶合金型人工筋肉を使うことで従来のモータを用いた電動義手よりも小型で軽量かつ駆動音の静かな電動義手の開発を目指している.Fig.1は開発した電動義手と携帯用制御器である.駆動方法としてON/OFFを使用した.Mov.1は0.55[kg]のPETボトルを把持させた動画である.開発した義手は強い把持力を持っていることが分かる.Mov.2はマジックペンを把持させた動画である.開発した義手は物を持つために必要な指のみの動作も可能である.Mov.3は被験者に義手を装着させ,物を把持させた動画である. | |||
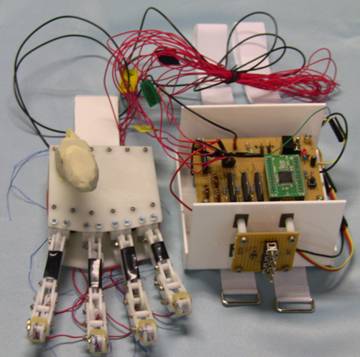 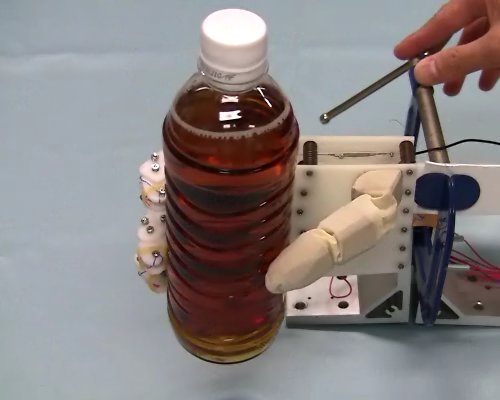 | |||
| Fig.1 The prosthetic hand and controller Mov.1
Grasp of a plastic bottle ※動画を見る際はタイトルをクリックして下さい. |
|||
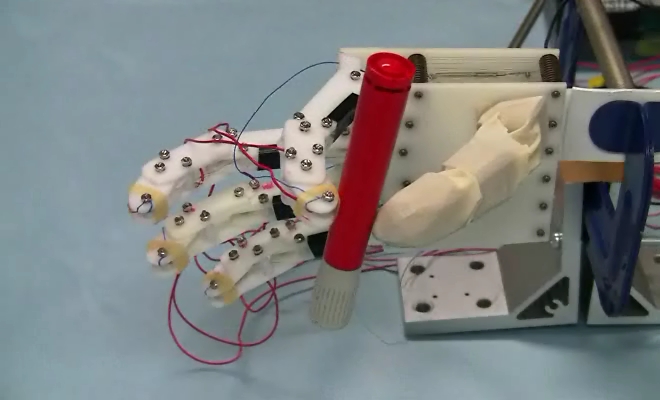 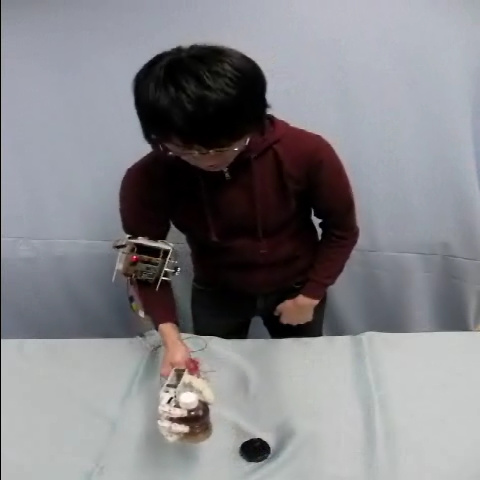 | |||
| Mov.2 Grasp of a pen Mov.3 Equipment experiment ※動画を見る際はタイトルをクリックして下さい. |
|||