 |
| Animation1 | |||
  |
|||
| Fig.1 | |||
 |
|||
| Fig.2 | |||
| Animation2 | |||
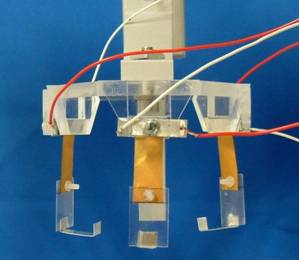
| 近年,新たなアクチュエータとしてイオン導電性高分子材料(例えばNafion)の両面に貴金属メッキを施したEAP型人工筋肉が注目されている.このEAP型人工筋肉は通電することで正極側へと屈曲するという特徴がある. 本研究は,EAP型人工筋肉を用いたロボットハンドの開発を目的としている.まず,EAP型人工筋肉を製作した.そして,その製作したEAP型人工筋肉を用いて通電実験を行った(Animation1).さらに,通電実験で得られたEAP型人工筋肉の変形挙動を模擬する計算手法を確立し,実験結果と計算結果を比較することで計算手法の妥当性を検討した(Fig.1).そして,これらの基礎研究を基に,EAP型人工筋肉を用いたロボットハンドの開発を行った(Fig.2).水の入ったプラスチックカップをロボットハンドで把持し持ち上げる動作実験を行い,ロボットハンドの有用性を確認した(Animation2). | |||