人間型ロボットによるブランコの立ち漕ぎ運動
ヒューマノイド分野
へ戻る
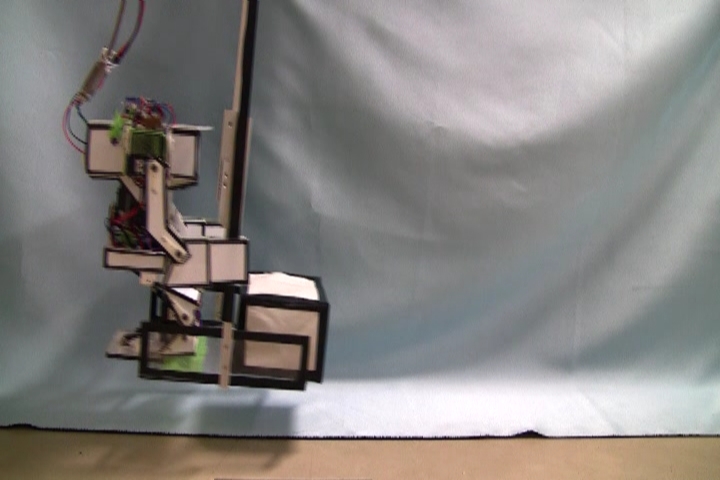
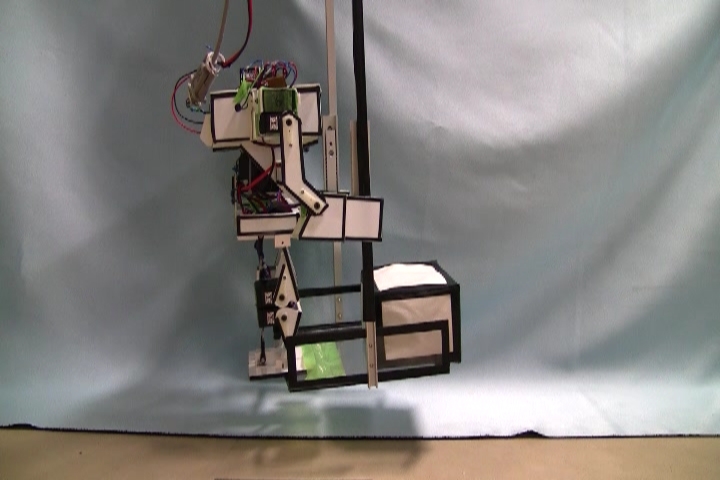
本研究では,人間型ロボットにブランコの立ち漕ぎ運動をさせています.ロボットの屈伸運動による重心の移動により,ブランコが励振される効果を利用してます.
ブランコ運動の動力学シミュレーションを行い,ブランコ運動について検討します.そして,人間型ロボットの製作を自らの手で行い,自律的にブランコ運動を行わせています.