 |
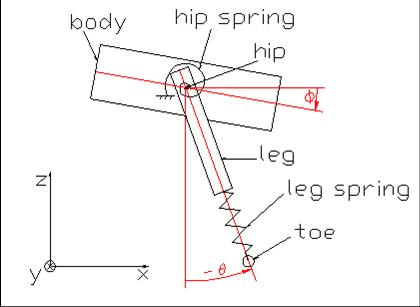  | |||
| 図1 ホッピングロボットのモデル 図2 製作したロボット | |||
| 動画1 Active runningシミュレーション 動画2 自由振動実験 | |||
| 現在,人間の走る動作をロボットで実現させるため2足走行ロボットの開発や研究が行われています.この走る動作は,歩く動作にホッピングを加えたものだと考える事ができます.このホッピングに注目し本研究ではホッピングロボットの研究と開発を行いました.
ホッピングロボットのモデルは2リンクと2つのバネから成ります.このモデルのロボットが倒れずにホッピングしながら走行していきます.走行方法は2つあり,1つは減衰の無い仮想世界でバネのみで動くPassive runningと,それにアクチュエータと制御を加えたActive runningがあります. 本研究では,2つの走行方法のシミュレーションと,そのうちの1つのリンクの設計と製作を行いました.そして自由振動実験までを行いました. |
|||