 |
 |
|||
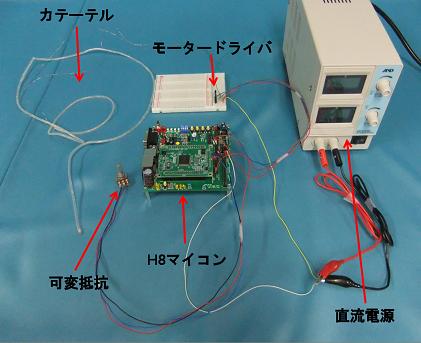
| Fig.1 システムの構成 Mov.1 エンドエフェクターの動作 | |||
| Mov.2 人体モデルを用いて試作したカテーテルの動作確認 Mov.3 『Mov.2』の分岐部の拡大 | |||
| 医療のなかでカテーテル治療については熟練した技術が必要であると言われている.本研究では熟練者でなくても容易に操作できるカテーテルの開発を目的とした.EAP(Electro-Active-Polymers,電気活性高分子)型人工筋肉は,(1)変形するときの応答が速く,(2)人体に無害であり,(3)小さな電流で大変形し,(4)制御が容易である,ため現在注目されている.カテーテルの先端部にアクチュエーターとしてEAP型人工筋肉を用いることを考えた.まずイオン導電性樹脂に金メッキを施したEAP型人工筋肉を製作した.次に水分を膨潤させたEAP型人工筋肉にマイコンを用いて通電させる実験を行った.そしてEAP型人工筋肉を用いたカテ―テルを試作しその有用性について検討した. | |||