 |
| |||
| 図1 製作した測定器 | |||
| 動画1 人間の着地動画とシミュレーション | |||
| |||
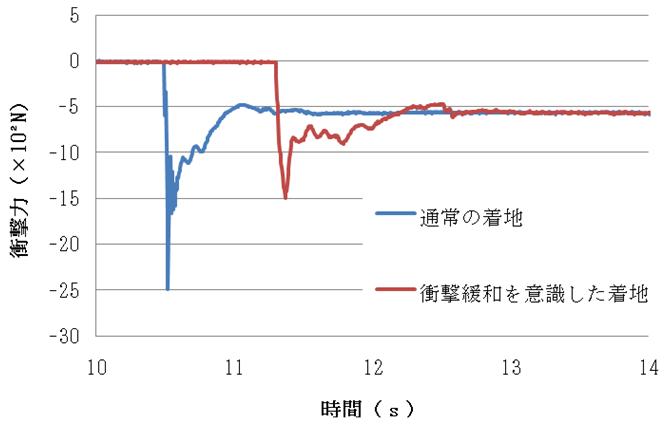
| 図2 着地姿勢の違いによる衝撃力の比較 | |||
| 近年,二足歩行ロボットの歩行に関する技術は発達してきていますが,それらはまだエンターテイメント用途の面が強く,実用域には達していません.今後さらに研究が進展していくうえで,人間型ロボットに走行や跳躍をさせるとなると,着地時に生じる衝撃が大きな問題となります.その衝撃は安定した動作の妨げとなり,部品を破損させる原因にもなります.
本研究は,人間型ロボットの着地時の衝撃をできるだけ和らげ,安定した動作につなげることを目的としています.そのために,実際に人間が着地を行う様子を動画撮影によって解析しました.また,それに伴って着地時の衝撃力を測定するための装置を作成しました.そしてそれらをもちいて着地時の衝撃力の値が最小になるような着地姿勢の考察を行い,その結果をもとにODEという物理計算エンジンを用いて人型モデルを作成し,着地のシミュレーションを行いました. |
|||