 |
動力学と最適制御 |
|||
  |
|||
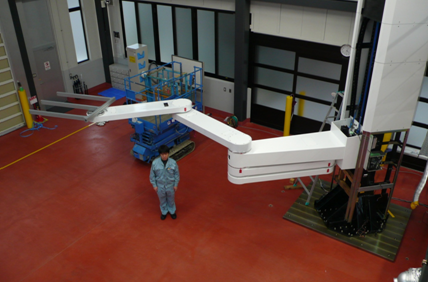
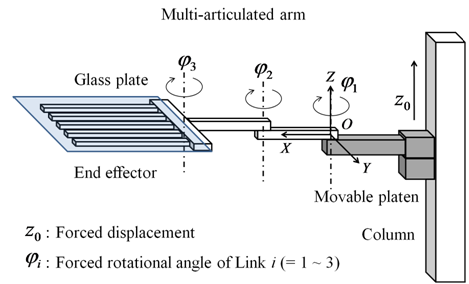
| Fig.1 スカラ・ロボット ㈱レクザム製作 Fig.2 スカラ・ロボットの概略図 | |||
| スカラ・ロボットの動作の一例 | |||
| 現在,液晶ディスプレイはテレビやパソコンなどに用いられており,日常生活に欠かせないものとなっている.近年では液晶パネルの大型化が進み,大画面で美しい映像を表示できるようになっている.これに伴い,Fig.1に示すような液晶パネル用ガラス板を搬送するロボットも大型化されており,ガラス板および搬送ロボットの稼働時の振動を抑制することが課題となっている.動画はスカラ・ロボットの動作の一例を表わしている.
本研究ではまず,Fig.2に示しているガラス板を搬送するスカラ・ロボットの概略図を作成し,動力学シミュレーションを行うことによって,実機の稼働時の挙動を模擬した.さらにシミュレーション上で振動制御を行い,制御の有効性を確認した.今後の目標としては振動制御シミュレーションによる結果を実機の制御に反映させ,スカラ・ロボットの振動を抑制し,液晶パネルの生産効率を向上させることが考えられる. |
|||